circles = cv2.HoughCircles(img,
cv2.HOUGH_GRADIENT, 1, 20,
param1=50, param2=40, minRadius=25, maxRadius=0)
img: 待檢測的灰度圖cv2.HOUGH_GRADIENT:檢測的方法���,霍夫梯度1:檢測的圓與原始圖像具有相同的大小,dp=2,檢測的圓是原始圖像的一半20:檢測到的相鄰圓的中心的最小距離(如果參數(shù)太小�����,除了一個真實的圓外,還可能會錯誤地檢測到多個相鄰圓���。如果太大�����,可能會漏掉一些圓���。)param1:在#HOUGHŠu梯度的情況下,它是較高的. 兩個閾值傳遞到Canny邊緣檢測器(較低的一個小兩倍)���。param2:在#HOUGHŠu梯度的情況下����,它是檢測階段圓心的累加器閾值�����。它越小�����,就越可能檢測到假圓;minRadius:最小圓半徑maxRadius:最大圓半徑��,如果=0����,則使用最大圖像尺寸。如果0���,則返回沒有找到半徑的中心��。
# 霍夫圓檢測
import cv2
import numpy as np
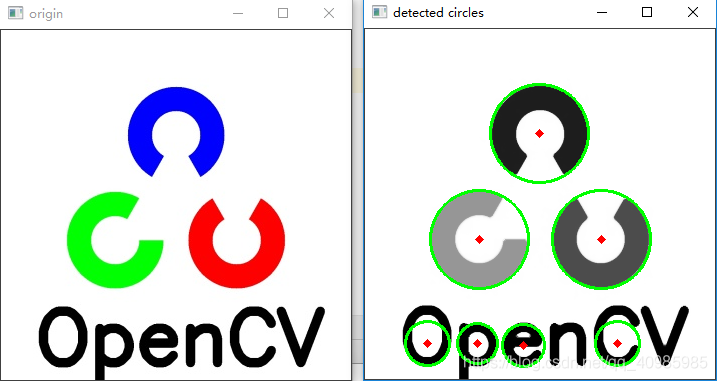
cimg = cv2.imread('opencv_logo_350.jpg')
cv2.imshow("origin", cimg)
cv2.waitKey(0)
img = cv2.cvtColor(cimg,cv2.COLOR_BGR2GRAY)
img = cv2.medianBlur(img, 5)
cimg = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
# - img: 待檢測的灰度圖
# - cv2.HOUGH_GRADIENT:檢測的方法��,霍夫梯度
# - 1:檢測的圓與原始圖像具有相同的大小���,dp=2,檢測的圓是原始圖像的一半
# - 20:檢測到的圓的中心的最小距離(如果參數(shù)為太小,除了一個真實的圓外�����,還可能會錯誤地檢測到多個相鄰圓��。如果太大��,可能會漏掉一些圓�。)
# - param1:在#HOUGHŠu梯度的情況下,它是較高的. 兩個閾值傳遞到Canny邊緣檢測器(較低的一個小兩倍)�����。
# - param2:在#HOUGHŠu梯度的情況下����,它是檢測階段圓心的累加器閾值�。它越小��,就越可能檢測到假圓���;
# - minRadius:最小圓半徑�����,也可能會檢測到假圓
# - maxRadius:最大圓半徑�����,如果=0�����,則使用最大圖像尺寸�����。如果0,則返回沒有找到半徑的中心���。
circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 20,
param1=50, param2=40, minRadius=0, maxRadius=0)
# 最小圓半徑設(shè)置不合適���,也可能會檢測到假圓
# circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 20,
# param1=50, param2=40, minRadius=0, maxRadius=0)
# circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 20,
# param1=50, param2=30, minRadius=10, maxRadius=0)
circles = np.uint16(np.around(circles))
print(len(circles))
print(circles)
for i in circles[0, :]:
# 繪制外圈圓(藍色)
cv2.circle(cimg, (i[0], i[1]), i[2], (0, 255, 0), 2)
# 繪制圓心(紅色)
cv2.circle(cimg, (i[0], i[1]), 2, (0, 0, 255), 3)
cv2.imshow('detected circles', cimg)
cv2.waitKey(0)
cv2.destroyAllWindows()
https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_houghcircles/py_houghcircles.html#hough-circles
到此這篇關(guān)于OpenCV霍夫圓變換cv2.HoughCircles()的文章就介紹到這了,更多相關(guān)OpenCV霍夫圓變換內(nèi)容請搜索腳本之家以前的文章或繼續(xù)瀏覽下面的相關(guān)文章希望大家以后多多支持腳本之家��!